 岩手大学 理工学部 システム創成工学科 知能メディア情報コース 萩原研究室 指導教員 萩原義裕
岩手大学 理工学部 システム創成工学科 知能メディア情報コース 萩原研究室 指導教員 萩原義裕
このページでは画像をクリックすると拡大します.
私たちは脳・視覚ー計測,認識,理解とその制御に関する最先端の研究を行っています

ロボットやコンピュータを人間に近づけるためには,周囲の状況を理解する能力,知識を発見する能力,論理的な思考能力,足りない情報を補ってイメージする能力など,人間が持つ様々な能力を実現しなければなりません.私たちの研究室では,これらの能力の実現を目指すとともに,それをCG作成ソフトや3Dゲームに役立てたり,ロボットの制御に応用したり,医師を始め高度な訓練を受け専門的な知識やスキルを持つ技術者に準じた判断能力を実現することにより,社会で役立つロボットやコンピュータソフトウエアを開発しています.
・バーチャル空間内でのパターンの再構成・理解・知識の発見に関する研究,および3DゲームやCGへの応用
・X線画像からの病変認識に関する研究,パターン認識ベースの医療ロボットに関する研究
・複合型触覚センサとアクチュエータに関する研究
・多足ロボットによる難路走行に関する研究
・教育用ロボットに関する研究
下記は具体的なテーマの一例です.

コンピュータ上で物体の自然な「変形(モーフィングなど)」を実現する手法を研究しています.たとえば画像処理分野でフィルタリングに用いられてきたマセマティカルモルフォロジによって作られたスケルトン(骨格)に対してシュリンクラップと呼ばれる処理を行うことにより,従来手法では困難であった,雑音や欠陥がある人物モデルに対しても適切な縮小を実現できる手法を開発しています.これらの技術は,3次元ゲームやコンピュータグラフィックスで自然な人体や衣類を表現するのに役立つのに加え,衣類の自動設計や,体型に応じてカスタマイズする必要があるパワーアシスト機器の自動設計などの現実的なニーズに対応するものであり,今後の発展が期待できる分野です.
バーチャル空間内でのパターンの再構成・理解・知識の発見に関する研究
X線画像からの病変認識に関する研究,パターン認識ベースの医療ロボットに関する研究
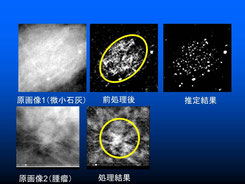
乳がんの診断では,触診と比べ,X線画像を用いた診断の有効性は格段に高いことが知られているが,高い技能を持つ診断医の不足は深刻です.そこで,様々な画像フィルタから得られる多様な特徴量と高性能化されたニューラルネット分類器や高精度なパターンマッチング方法などを考案して従来の情報処理システムの改善に取り組み,高精度なパターン情報処理システムを開発しました.その研究成果の一部は自動診断システムに採用されました.
また,画像処理をロボットを組み合わせた医療ロボットの開発にも取り組んでいます.
多足ロボットによる難路走行に関する研究,教育用ロボットに関する研究

多足ロボットによる難路走行において,生物の歩行に関する知見を取り入れエネルギー効率の高い多足ロボットの研究を行っています.エネルギー効率の高さは省エネルギーという観点以外に,走る・飛ぶなど生物の基本的な動作を実現するために必須の技術であり,防犯パトロールロボットなど長期自動運用が求められる分野などへの応用が期待できます.
面白い,役に立つ,を私たちとともに
私たちの研究室では,ほとんどのメンバーが大学院まで進み,研究と学生生活をじっくりと満喫しています.ソフトやハードを作る課外活動も盛んです.わたしたちと一緒にいろいろなことにチャレンジしてみませんか.

older contents
大学院 博士課程・修士課程(博士前期課程)・研究生 をご検討の皆様
お気がるにご相談ください。http://www.eng.iwate-u.ac.jp/jp/inquiry/index.html
経験等により入学試験の一部が免除されるなどの特典があります。インターネットを利用すれば遠隔地在住の方も博士課程で研究することは可能です。
- 初音ミクは,クリプトン・フューチャー・メディア株式会社のキャラクターです.
- このページはJimdoFreeで作られているため下記のバナーがありますが,なにとそお許しください.